 Elektronický vzedálací materiál
Elektronický vzedálací materiál
-
Funkcie
-
Rovnice a nerovnice
-
Dôkazy
-
Výroková logika
-
Stereometria
-
Planimetria
-
Vektory
-
Komplexné čísla
-
Kombinatorika
-
Pravdepodobnosť
-
Štatistika
Súradnicová sústava v priestore
- V rovine môžu byť najviac dva lineárne nezávislé vektory. Každé tri vektory v rovine sú lineárne závislé.
- V priestore môžu byť najviac tri lineárne nezávislé vektory. Každé štyri vektory v priestore sú lineárne závislé.
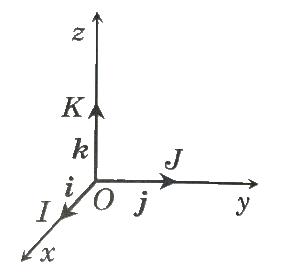
- Súradnicová sústava v priestore
- je ľubovoľný bod O a tri lineárne nezávislé vektory i = OI j = OJ k = OK Bod O je začiatok súradnicovej sústavy, priamky
x = OI , y = OJ z = OK sa nazývajú súradnicové osi.
- Označujeme ju (O, x, y, z). Ak |i| = |j| = |k| = 1 a každé dve z osí x, y, z sú kolmé,
súradnicová sústava sa nazýva karteziánska. Budeme používať pravotočivú karteziánsku sústavu
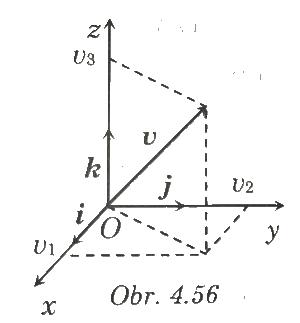
- Súradnice vektora
- Každý vektor v v priestore je lineárnou kombináciou vektorov i, j, k, teda existujú reálne čísla v1, v2, v3 tak, že
- v = v1 i + v2 j + v3 k.
- Čísla v1, v2, v3 sú súradnice vektora v v súradnicovej sústave (O, x, y, z), teda
- v = [v1; v2; v3]
- Pre každé dva vektory u = [u1; u2; u3], v = [v1; v2; v3] a pre každé reálne číslo k platí:
- 1. u + v = [u1 + v1; u2 + v2; u3 + v3], 2. ku = [ku1; ku2; ku3].
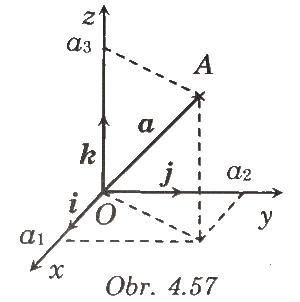
- Súradnice bodu
- Každému bodu A v priestore môžeme priradiť jeho polohový vektor a = OA Súradnicami bodu A v (O, x, y, z) budeme rozumieť súradnice jeho polohového vektora, teda
- A[a1;a2;a3] ⇔ a = OA = [a1; a2; a3]
- Súradnice vektora v = AB vypočítame ako rozdiely súradníc koncového bodu a začiatočného bodu jeho ľubovoľného umiestenia, teda
- v = AB = [b1 - a1; b2 - a2; b3 - a3]
- Stred Úsečky
- Uvažujme úsečku AB, kde A[a1; a2; a3],
B[b1; b2; b3]. Nech S[s1; s2; s3] je stred úsečky AB. Potom
- S [
a1 + b1/2
;
a2 + b2/2
;
a3 + b3/2
]
- Vzdialenosť bodov, velkosť vektora
- Vzdialenosť bodov A, B je dĺžka úsečky AB. Pre vzdialenosť bodov A[a1; a2; a3]; B[b1; b2; b3], v karteziánskej súradnicovej sústave (O, x, y, z) platí:

- Veľkosť vektora je dĺžka jeho ľubovoľného umiestnenia.
- Ak v = AB = B - A , tak v = [b1 - a1; b2 - a2; b3 - a3] = [v1; v2; v3]
